I’m currently in Hiroshima, Japan at ISRR. It’s been a good conference so far, with lots of high quality talks. I’m also enjoying the wonderful Japanese food (though fish for breakfast is a little strange).
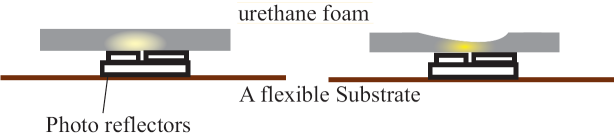
One of the most interesting talks from Day 1 was about designing a skin-like touch sensor. The design is ingeniously simple, consisting of a layer of urethane foam with some embedded LEDs and photodiodes. The light from the LED scatters into the foam and is detected by the photodiode. When the foam is deformed by pressure, the amount of light reaching the photodiode changes. By arranging an array of these sensing sites under a large sheet of foam, you get a skin-like large-area pressure sensor. The design is simple, cheap, and appears to be quite effective.
Having a decent touch sensor like this is important. People rely on their sense of touch much more than they realize – one of the presenters demonstrated this by showing some videos of people trying to perform simple mechanical tasks with anaesthetised sensory neurons (they weren’t doing well). Walking robots weren’t getting very far until people realized the importance of having pressure sensors in the soles of the feet.
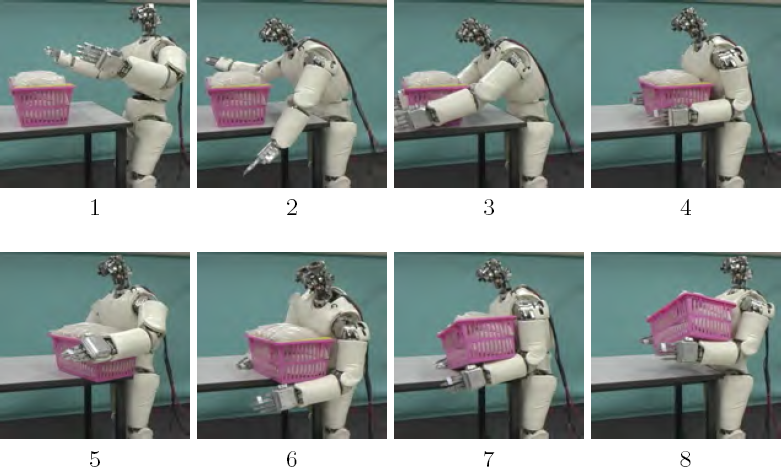
The authors were able to show some impressive new abilities with a humanoid robot using their sensor. Unfortunately I can’t find their videos online, but the below figure shows a few frames of the robot picking up a 30KG load. Using its touch sensor the robot can steady itself against the table, which helps with stability.
I get the impression that the sensor is limited by the thickness of the foam – too thick to use on fingers for example. It’s also a long way from matching the abilities of human skin, which has much higher resolution and sensitivity to other stimuli like heat, etc. Still, it’s a neat technology!
Update: Here’s another image of the robot using it’s touch sensor to help with a roll-and-rise manoeuvre. There’s a video over at BotJunkie.
{kind=link}
Citation: “Whole body haptics for augmented humanoid task capabilities“, Yasuo Kuniyoshi, Yoshiyuki Ohmura, and Akihiko Nagakubo, International Symposium on Robotics Research 2007.
Haven’t touchpads on laptops been able to do this for years?
Not really – touch pads rely on the electrical properties of your finger to work. Try touching one with a bit of plastic – nothing happens. So, that technology isn’t much good for a general pressure sensor.
Also, I suspect the design described above is much cheaper per unit area, plus it’s easy to assemble into arbitrary shapes.
pressure sensors are great for remote pressure measurements and they very accurate too-:-